

El aprendizaje autoorganizado y la excitación aleatoria interna como mecanismos para la imitación y la ejecución de acciones imaginadas
En un video reciente, Pentti Haikonen presenta un enfoque novedoso para el aprendizaje por imitación—uno que no depende de las neuronas espejo. En su lugar, demuestra cómo una máquina puede aprender a imitar acciones motoras utilizando sus neuronas asociativas Haikonen, un modelo que permite que la imitación surja a partir de procesos internos de aprendizaje.
Paso 1: De la Imaginación Mental a la Acción Física
Haikonen señala una capacidad humana fundamental: podemos aprender a imitar comportamientos observados, como expresiones faciales, gestos o sonidos vocales. De forma aún más sorprendente, podemos ejecutar acciones que solo hemos imaginado, sin haberlas visto previamente. Esto implica transformar imágenes mentales en comandos motores específicos que controlan nuestros músculos.
Desde la perspectiva de una arquitectura cognitiva, esta transformación requiere una conexión entre las señales perceptivas (lo que se ve o imagina) y la salida motora (las señales de control enviadas a los músculos). Los modelos tradicionales invocan a las neuronas espejo para explicar esta conexión, pero Haikonen propone una alternativa: su sistema se basa en la autoorganización y la excitación aleatoria interna, lo que permite que los estímulos perceptivos se asocien con patrones motores a través del aprendizaje—sin necesidad de estructuras neuronales predefinidas para la imitación.

Paso 2: Excitaciones Aleatorias como Camino hacia la Imitación
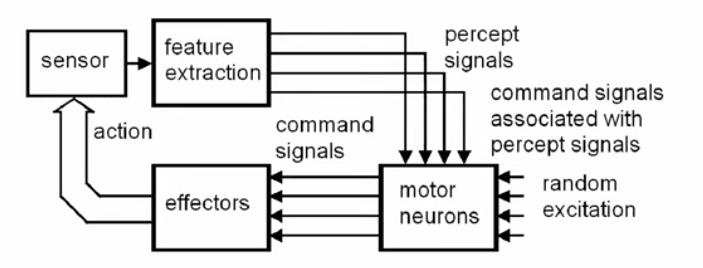
Para resolver el problema de la imitación, Haikonen propone un mecanismo innovador: la excitación aleatoria interna de las neuronas motoras. Inicialmente, los comandos motores no provienen de un comportamiento aprendido, sino que surgen de señales internas aleatorias, generando movimientos espontáneos y descoordinados—en esencia, acciones exploratorias (aleatorias).
Sin embargo, estas acciones no pasan desapercibidas. El propio sistema percibe sus movimientos mediante retroalimentación sensorial interna—lo que ve, siente o escucha como resultado de su acción. Estas impresiones sensoriales (perceptos o «percepts«) se asocian con las señales motoras aleatorias que las provocaron.
Con el tiempo, el sistema aprende a reconocer qué patrones motores producen qué resultados perceptivos. A través de este proceso auto-supervisado, se establece una correspondencia bidireccional: de la percepción al comando motor, y viceversa. Esta correspondencia permite que el sistema, más adelante, reproduzca una acción observada, no porque tenga neuronas espejo programadas, sino porque ha aprendido el vínculo interno entre lo que ve y cómo hacerlo.
Este enfoque sienta las bases para una imitación sin estructuras innatas, basada en el aprendizaje, la retroalimentación y la autoorganización interna.
Paso 3: De la Imaginación a la Acción mediante Percepción Virtual
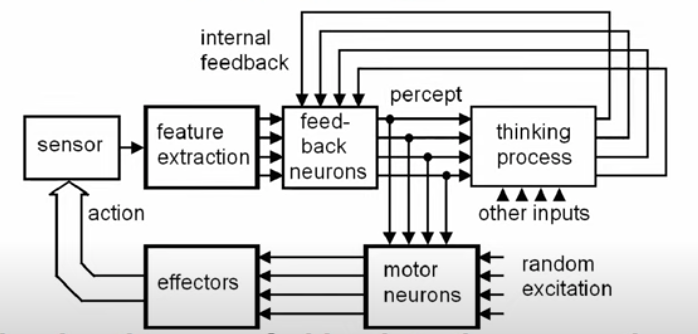
Una vez que el sistema ha establecido una conexión entre los comandos motores y sus resultados perceptivos, surge una capacidad poderosa: la posibilidad de imaginar acciones y llevarlas a cabo.
En este paso, las acciones imaginadas—representaciones internas de movimientos—pueden ser retroalimentadas al sistema perceptivo como perceptos virtuales. Es decir, el sistema simula internamente la experiencia de realizar una acción sin ejecutarla físicamente. Esta simulación activa las mismas asociaciones perceptivo-motoras que se formaron previamente durante el aprendizaje mediante excitación aleatoria.
Como el sistema ya ha aprendido qué comandos motores corresponden a qué perceptos, ahora puede tomar una acción imaginada (un percepto virtual) y traducirla en una acción real. De este modo, la imagen mental se convierte en comportamiento ejecutable.
Este mecanismo refleja una faceta clave de la cognición humana: podemos ensayar mentalmente una acción antes de llevarla a cabo. Los atletas visualizan movimientos, los músicos imaginan interpretar una pieza, y planificar implica simular posibles acciones antes de actuar. El modelo de Haikonen muestra cómo una máquina podría lograr una capacidad similar—actuar no solo según lo que percibe, sino también según lo que imagina.
Paso 4: Demostración Hardware del Principio de Imitación
Para ilustrar este enfoque innovador, Haikonen presenta una demostración tangible utilizando dos placas de circuito diseñadas especialmente, cada una implementando su modelo de neuronas asociativas Haikonen.
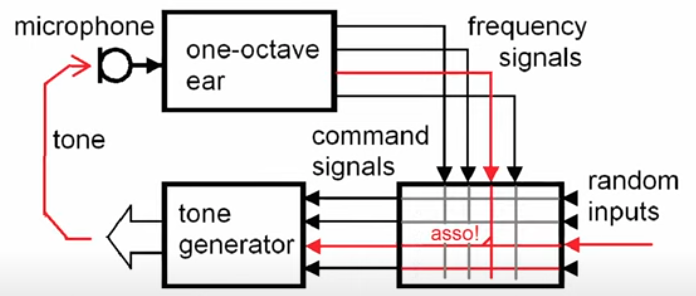
En este experimento, una de las placas cumple la función de actuador motor, equipada con un generador de tonos, mientras que la otra actúa como el sistema perceptivo, o “oído artificial”, capaz de detectar frecuencias de sonido en un rango de una octava.
El proceso comienza con una señal de entrada aleatoria enviada a la placa actuadora, que genera un tono aleatorio. Este tono es detectado por el oído artificial, que lo convierte en una señal perceptiva—simulando cómo un organismo “escucha” su propia acción.
Lo crucial es que el sistema asocia la señal motora aleatoria con el tono percibido. Una vez establecida esta asociación, escuchar el mismo tono en el futuro desencadenará su reproducción por parte del generador de tonos—lo percibido se convierte en lo ejecutado. El sistema ha aprendido, en esencia, a imitar un tono mediante la vinculación entre percepción y acción a través de la asociación interna, sin reglas preprogramadas ni neuronas espejo.
Esta demostración sencilla pero elegante constituye una prueba de concepto para una teoría más amplia: la imitación puede surgir a partir de mapas perceptivo-motores autoorganizados, sin necesidad de estructuras neuronales especializadas (como las neuronas espejo).